Goal Oriented Action Planning
First introduced in 2004 by Jeff Orkin and developed for the game F.E.A.R, goal oriented action planning starts with the list of goals with fixed priority, a function that validates the goal i.e (should the goal be pursued) and the desired world state that the AI is trying to achieve. Next we have a list of actions for the AI for e.g. Melee Attack, Ranged Attack, Move to a location, etc. The list also contains the world state it will achieve after the action is performed, the world state required to perform that action and a validation check to ensure the action can be performed to reach the desired world state.
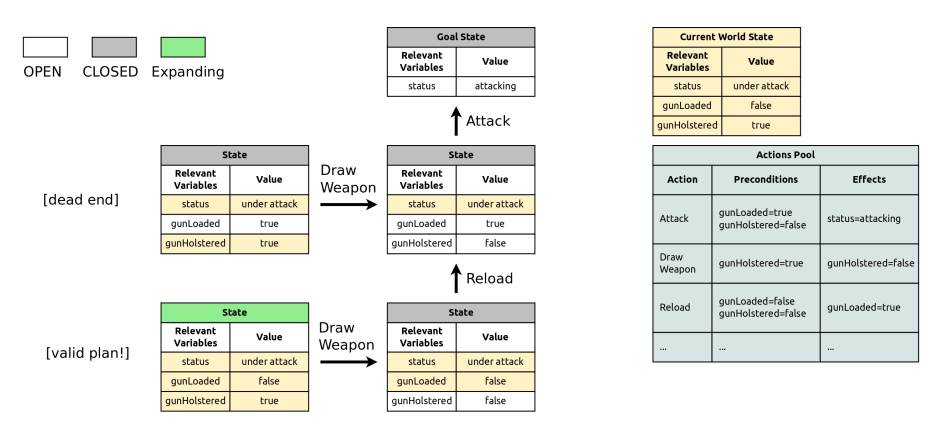
To build a plan the AI needs a valid goal, an action that satisfies the goal, an action that satisfies the preconditions of the previous action and so on until the current world state is matched. The AI will use a path-finding algorithm to find the shortest path to the goal and then execute the actions in the plan. This Video from GDC dives a lot deeper into GOAP.
This project includes a simple GOAP implementation in Unreal Engine 4. The AI is the ship that creates a plan to gather resources (Brown, Yellow, Pink, Grey) and deliver them to the base (white). GOAP Planner is used in relation with the state machine and uses path-finding algorithm to search for the best plan by relaxing the preconditions set upon the actions that the ship need to perform. Action is performed to relax the precondition and get closer to the goal state. The current implementation of GOAP is using a BFS search that is known for it's exponential time space complexity however in this case, since the branching factor is small, the algorithm is still considered efficient. As the ship moves it unreserves the path before it as it won't be used anymore. If there is a spot on the path that is reserved by more than one ship, the algorithm checks for the ship that will finish its path quickly and priorities its movement while all the other ship replan their path or wait for the priority ship to pass through. This type of planning is referred to as reactive planning strategy based on minimum communication policy (MCP).
No collision avoidance at the base (white).
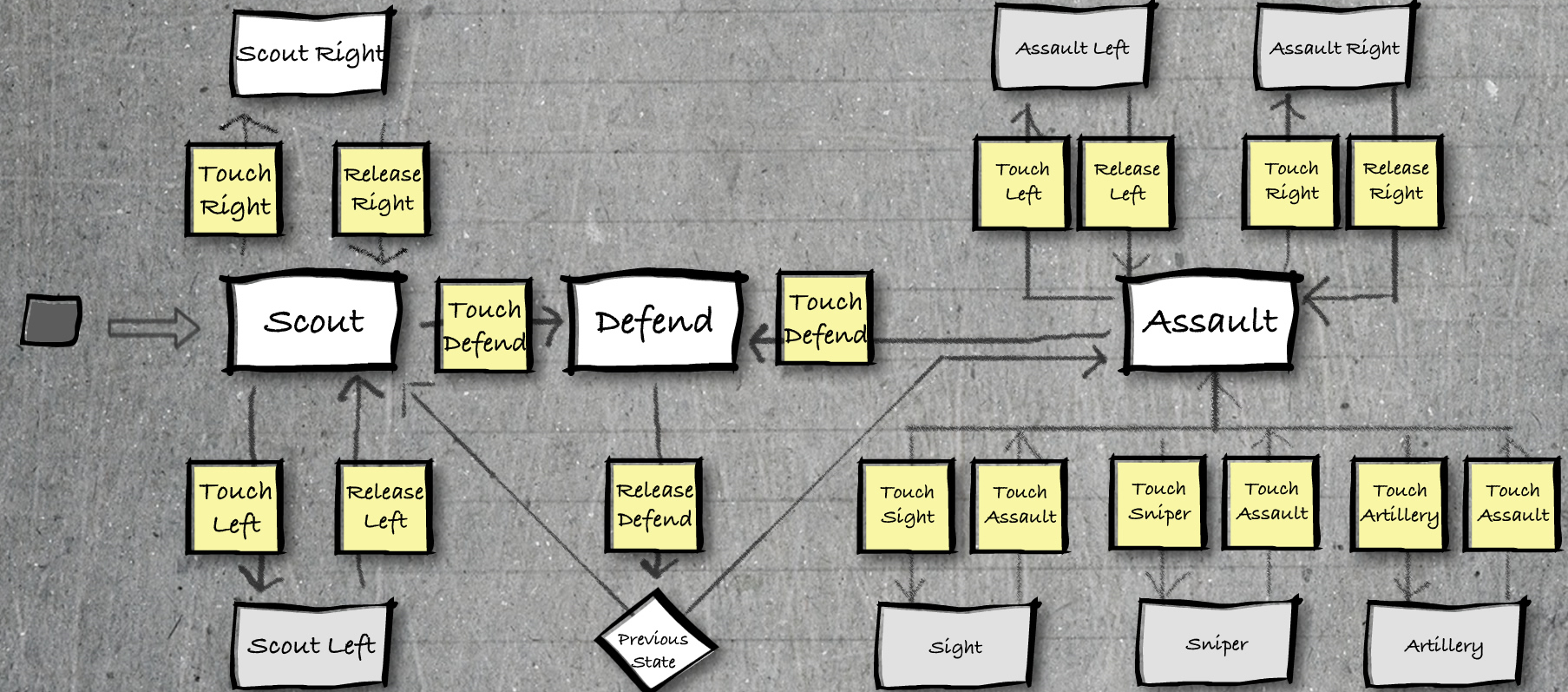
State Machine
#pragma once
/*----------------------------------------------------------------------------*/
/* Copyright (c) 2008 John Downey (jtdowney@purdue.edu) */
/* */
/* Permission is hereby granted, free of charge, to any person obtaining a */
/* copy of this software and associated documentation files (the "Software"), */
/* to deal in the Software without restriction, including without limitation */
/* the rights to use, copy, modify, merge, publish, distribute, sublicense, */
/* and/or sell copies of the Software, and to permit persons to whom the */
/* Software is furnished to do so, subject to the following conditions: */
/* */
/* The above copyright notice and this permission notice shall be included in */
/* all copies or substantial portions of the Software. */
/* */
/* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR */
/* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, */
/* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL */
/* THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER */
/* LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING */
/* FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER */
/* DEALINGS IN THE SOFTWARE. */
/*----------------------------------------------------------------------------*/
// Modified by Jason Haasz for Monash University
// A template/generic programming based approach to a statemachine.
#include (map)
// E - a user defined enum/index for a unique state
// T - the class that owns the state machine.
template(class E, class T)
class StateMachine
{
public:
typedef void (T::*CallbackOnEnter)();
typedef void (T::*CallbackOnTick)(float);
typedef void (T::*CallbackOnExit)();
private:
T* m_pOwner;
E m_currentState;
std::map(E, CallbackOnTick) m_statesOnTick;
std::map(E, CallbackOnEnter) m_statesOnEnter;
std::map(E, CallbackOnExit) m_statesOnExit;
public:
StateMachine(T* pOwner, E emptyState)
{
m_currentState = emptyState;
m_pOwner = pOwner;
}
~StateMachine()
{
}
void RegisterState(E state, CallbackOnEnter callbackEntry, CallbackOnTick callbackTick, CallbackOnExit callbackExit)
{
m_statesOnEnter[state] = callbackEntry;
m_statesOnTick[state] = callbackTick;
m_statesOnExit[state] = callbackExit;
}
E GetCurrentState(void)
{
return m_currentState;
}
void ChangeState(E statenext)
{
if (m_pOwner)
{
CallbackOnExit callbackExit = m_statesOnExit[m_currentState];
if (callbackExit)
{
// Exit old state
(m_pOwner->*callbackExit)();
}
}
m_currentState = statenext;
if (m_pOwner)
{
CallbackOnEnter callbackEnter = m_statesOnEnter[m_currentState];
if (callbackEnter)
{
// Enter new state
(m_pOwner->*callbackEnter)();
}
}
}
//Update Current State
void Tick(float fTimeStep)
{
if (m_pOwner)
{
CallbackOnTick callback = m_statesOnTick[m_currentState];
if (callback)
{
(m_pOwner->*callback)(fTimeStep);
}
}
}
};
Adding Transitioning States
// Sets default values
AShip::AShip()
{
// Set this actor to call Tick() every frame.
PrimaryActorTick.bCanEverTick = true;
MoveSpeed = 200;
Tolerance = 10;
ActionStateMachine = new StateMachine(ACTOR_STATES, AShip)(this, State_Nothing);
ActionStateMachine->RegisterState(State_Idle, &AShip::OnIdleEnter, &AShip::OnIdleTick, &AShip::OnIdleExit);
ActionStateMachine->RegisterState(State_Move, &AShip::OnMoveEnter, &AShip::OnMoveTick, &AShip::OnMoveExit);
ActionStateMachine->RegisterState(State_Action, &AShip::OnActionEnter, &AShip::OnActionTick, &AShip::OnActionExit);
ActionStateMachine->ChangeState(State_Idle);
MaxIdleTime = 3;
CurrentIdleTime = 0;
// Start with the action of collecting gold
CollectTreasureAction* TreasureAction = new CollectTreasureAction();
TreasureAction->AddPrecondition("HasMorale", false);
TreasureAction->AddEffect("HasMorale", true);
AvailableActions.Add(TreasureAction);
// Decrease Rum for each action performed. Each ship starts with 75 rum
NumRum = 75;
}